Sfogliando il catalogo Servotecnica si possono trovare soluzioni per il Motion Control tra le più disparate, controllori analogici, con protocollo Ethernet e infine soluzioni EtherCAT. La […]
Sfogliando il catalogo Servotecnica si possono trovare soluzioni per il Motion Control tra le più disparate, controllori analogici, con protocollo Ethernet e infine soluzioni EtherCAT. La scelta di quale strada intraprendere a volte diventa difficoltosa vista la sovrapposizione esistente tra le varie soluzioni. Vogliamo con questa presentazione fornire delle basi indicative di come poter scegliere senza la pretesa di aver individuato tutte le soluzioni possibili.
Partendo dalla consapevolezza che ormai i sistemi sono sempre più complessi e che hanno l’esigenza di scambiare informazioni sia tra elementi della stessa macchina sia tra componenti dislocati a volte lontano tra loro, una prima demarcazione va data tra controllori con protocollo Ethernet e altri con protocollo EtherCAT.
Comunicazione Ethernet
Lo scopo principale della comunicazione Ethernet è l’integrità dei dati e la quantità di dati trasmessa nell’unità di tempo ovvero “throughput”. I dati sono trasmessi in oggetti definiti pacchetti. Ogni pacchetto di dati contiene dei campi quali l’indirizzo della sorgente, l’indirizzo del destinatario, le informazioni oggetto di scambio ovvero “payload data” o “Ethernet Data” etc. I dati contenuti nel “Ethernet Data”, vedi Fig. 1, possono essere di dimensioni diverse a seconda del tipo di protocollo. Potendo raggiungere i 100 Mbit/sec come velocità di trasmissione si potrebbe definire che una rete Ethernet rappresenti una comunicazione praticamente istantanea.
Il termine “praticamente” è da impiegare in quanto nella comunicazione Ethernet, essendo tutti i componenti sia ricevitori che trasmettitori, possono provocare un sovraccarico di dati che può causare dei ritardi intermittenti e non prevedibili qualora dei pacchetti vengano persi o a causa di possibili collisioni. Questi eventi possono essere minimizzati ma non completamente eliminati. Qualora dovessero succedere, il ritardo di comunicazione, supererebbe il millisecondo e questo per una motion controller non è accettabile. Per questo motivo la comunicazione Ethernet viene definita come non deterministica in quanto non garantisce che le informazioni possano arrivare a destinazione in un tempo definito e costante.

Controlli analogici
Un diagramma a blocchi di un sistema che usa un PC e una motion controller è rappresentato in Fig. 2. Si nota che la comunicazione Ethernet è ristretta tra host e motion controller mentre tra questa e i drivers avviene impiegando lo standard analogico +/- 10 VDC. Il profilo di moto in tempo reale, gli Ingressi uscite, il filtro PID sono nel controllo assi. Dato che i comandi di I/O, il segnale analogico sono trasmessi tramite connessioni elettriche in rame il ritardo tra invio e ricezione del comando è praticamente nullo. La comunicazione non real time è solo tra Pc e motion controller.
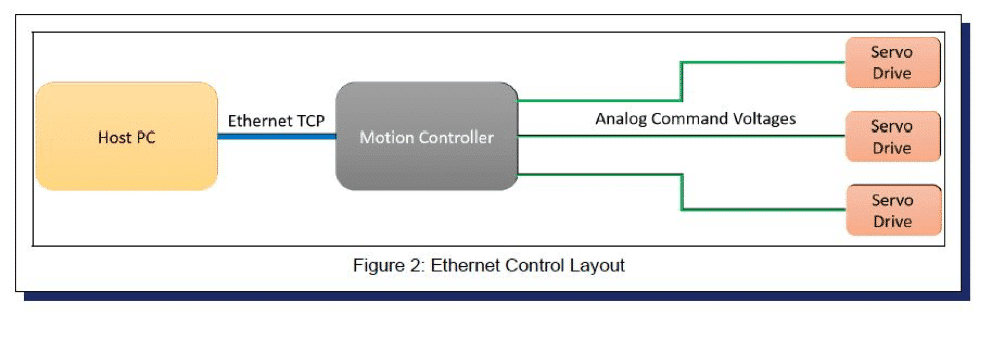
Possiamo quindi asserire che una motion controller analogica abbia intrinsecamente una soluzione deterministica.
Comunicazione EtherCAT
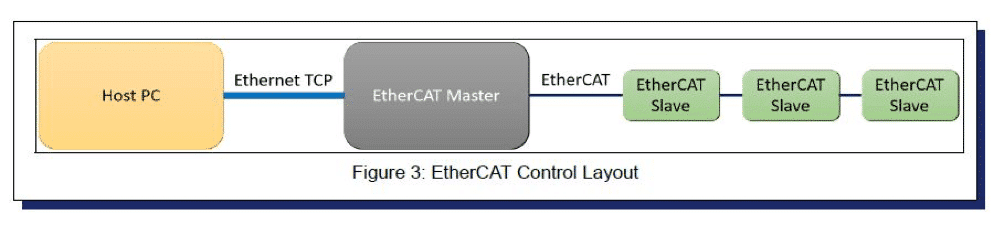
In una soluzione EtherCAT la comunicazione tra Host PC e Master EtherCAT non è critica. Il profilo di moto e i comandi di I/O sono generati dal Master EtherCAT come schema a blocchi in Fig. 3. Rispetto alla soluzione precedente il comando di movimento tra Controllo assi e Drivers invece di avvenire tramite segnale analogico avviene tramite 32 bit per la posizione comandata o 16 bit per comando di corrente.
I dati sono trasmessi in un pacchetto con struttura simile a quella impiegata nella comunicazione Ethernet vedi Fig. 4., altrettanto i segnali encoder e degli I/O tornano al Master EtherCAT. Questo avviene in un intervallo di tempo regolare conosciuto come EtherCAT Cycle Time, generalmente 1 msec ma può scendere sino a 0,1 millisecondi.

Se EtherCAT impiega la stessa struttura di pacchetti come Ethernet e la stessa connessione elettrica come sopperire ai potenziali problemi dovuti all’incertezza della comunicazione? La differenza sta nell’alto grado in cui la comunicazione EhterCAT è coordinata e strutturata, inoltre due trasmettitori EtherCAT non possono esistere nella stessa rete; tutto questo elimina la possibilità di avere collisioni durante la trasmissione. Ogni elemento è equipaggiato con un ASIC che permette a ciascuno di prendere direttamente le informazioni dal pacchetto EtherCAT mappandolo in memoria e rinviando le proprie informazioni nello stesso pacchetto; questo dato è usato o nel profilo di moto o nell’ aggiornamento del registro di posizione a seconda del modo operativo. E’ questo modo diretto di ricevere e inviare i dati che minimizza il ritardo esaltando nei sistemi EtherCAT la capacità di processare informazioni ad una velocità senza uguali anche rispetto a sistemi analogici. Tutti questi vantaggi comportano un costo. Il network deve essere settato via software prima di essere impiegato. Ogni EtherCAT Slave deve essere configurato perché possa prendersi carico di un solo settore di bytes all’interno del pacchetto. Il network EtherCAT deve essere chiuso rendendolo incompatibile con lo standard Ethernet se impiega switches o hubs. Per ultimo l’impiego di un ASIC anche per i segnali di I/O o analogici nonché i servo azionamenti comportano un incremento di costo rispetto a motion controller analogici. E’ anche vero che il numero di assi EtherCAT è in continuo aumento quindi nel prossimo futuro il gap di costo andrà sempre più riducendosi.
Controlli centralizzati o distribuiti
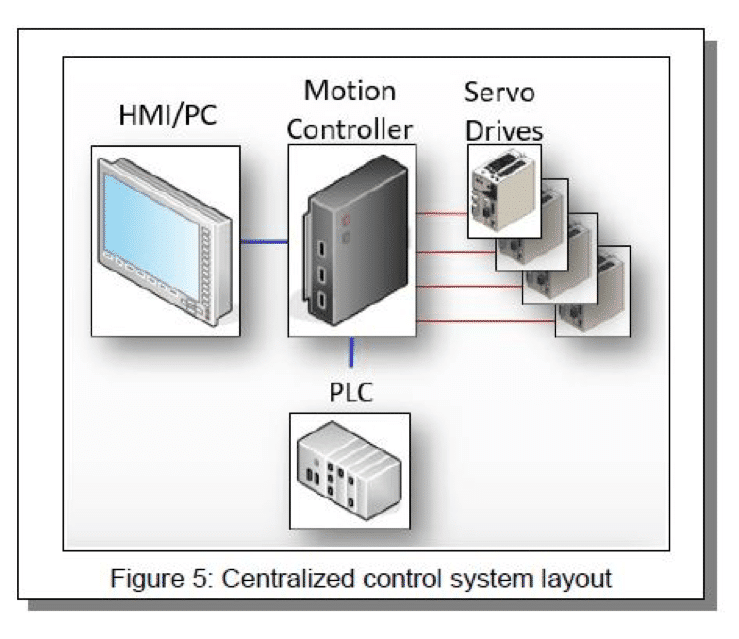
Un sistema con controllo centralizzato consiste essenzialmente in una motion controller che si occupa di coordinare il moto degli assi, gestire degli I/O, comunicare verso un host PC o una HMI. Un esempio tipico è una macchina CNC, rappresentata a blocchi nella Fig. 5. Ci sono almeno 4 assi, numerosi I/O come limit switches, tastatori, può coesistere un PLC per gestire I/O addizionali. Tutte le informazioni in ingresso e i comandi in uscita vengono processati da un singolo controllo che coordina le azioni in pochi millisecondi. In questo sistema un clock assicura che i feedback dai motori e i comandi verso i driver vengano processati in tempo reale quindi con certezza del tempo di campionamento in modo deterministico.
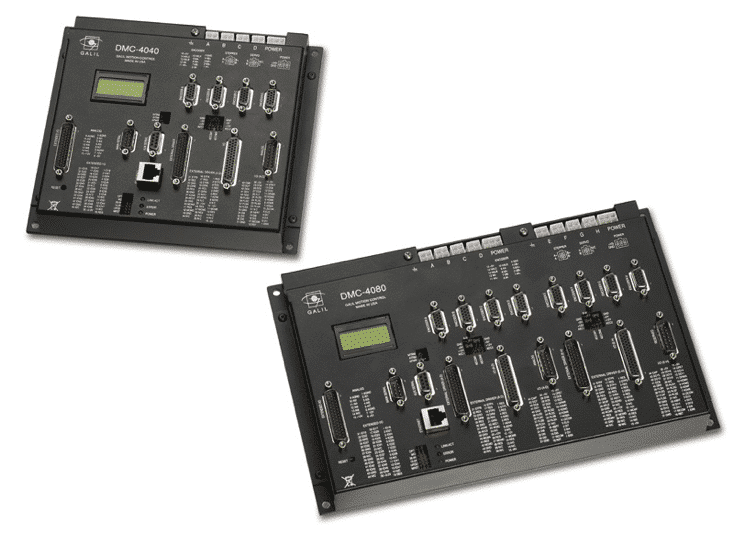
Un tipico esempio di controllo centralizzato lo troviamo nella figura sottostante, si tratta dei controllori Galil serie DMC-40×0 da 4 e da 8 assi, nello stesso involucro sono alloggiati sino a 8 driver adatti per pilotare motori fino a 1,2 Kw brushless, brush o stepper aumentando la velocità di esecuzione, evitare interferenze elettriche, e per contenere i costi. Nella soluzione senza driver integrati si potranno impiegare qualsiasi driver; la soluzione che propone Servotecnica sono azionamenti Mecapion alimentati direttamente da rete dalle dimensioni contenute come anche per i costi oppure verso la famiglia di drivers Ingenia.
Una seconda opportunità viene dall’impiego di controllori LSIS e dai rispettivi drivers. Il controllore si interfaccia verso HMI tramite protocolli ad alto livello ma potrebbe essere una interfaccia con protocollo Ethernet mentre invia i comandi di moto tramite protocollo EtherCAT.
Similmente a questa soluzione è ora disponibile il primo controllore EtherCAT GALIL che può gestire sino a 32 Slave oltre a 2 moduli IO EtherCAT

L’abbinamento verso i driver che proponiamo sono sempre driver Mecapion con alimentazione da rete o driver Ingenia .
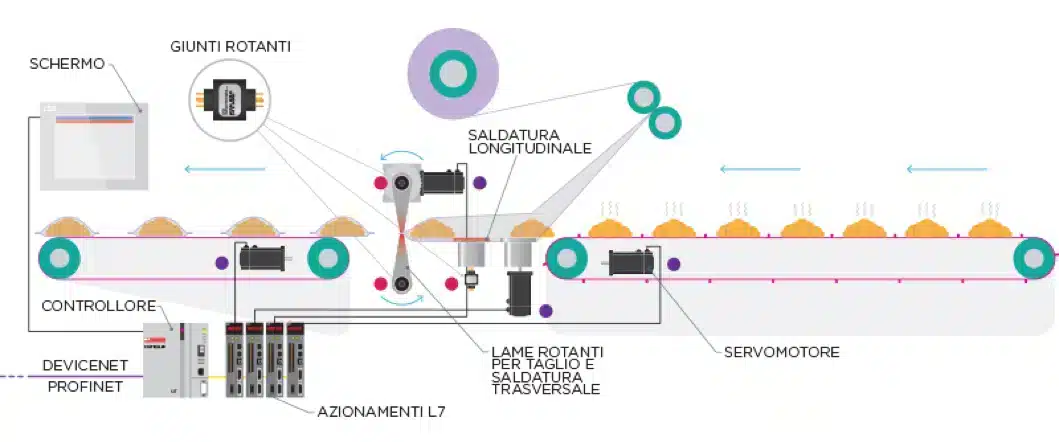
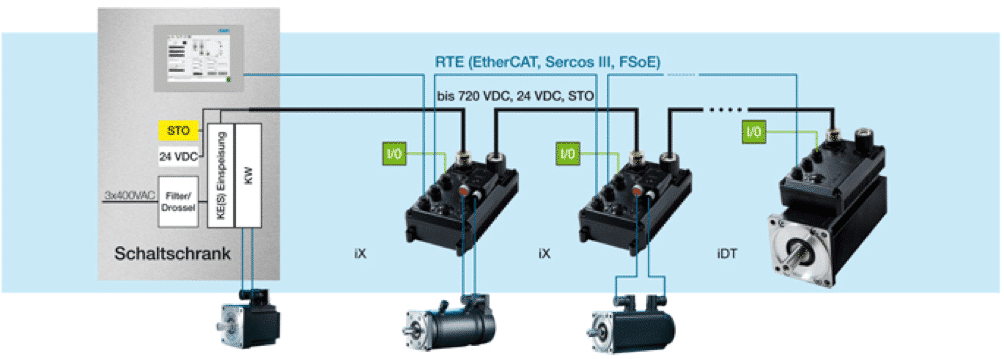
Quando il sistema si sviluppa con una certa lunghezza o con un numero elevato di assi la soluzione decentralizzata è da considerarsi la migliore. Permette una forte riduzione dei tempi di cablaggio, diminuzione drastica di introdurre tramite cavi elettrici disturbi elettromagnetici; anche in vista di una ottimizzazione della manutenzione sono certamente preferibili rispetto ai sistemi centralizzati.
Nella figura sottostante i controllori di moto e i PLC si scambiano informazioni attraverso un bus di campo, tipicamente Ethernet. I controlli deterministici come IO e il moto sono gestiti localmente. Ogni nodo è composto da un master che invia i comandi e monitora lo stato dei vari componenti elettronici. Il beneficio è che ogni controllo viene impiegato per una funzione specifica migliorando notevolmente i tempi di elaborazione assegnando risorse specifiche per elaborare processi che devono prevedere una priorità di esecuzione rispetto ad altri.
Determinismo
Impiegare un hardware con un clock e interrupt definito, piuttosto che una sincronizzazione tramite cycle time EtherCAT, ci troviamo in entrambi i casi ad operare con soluzioni deterministiche. Spesso si assume che essendo EtherCAT un protocollo deterministico debba essere usato in esclusiva quando queste funzioni siano richieste. Per chiarire in entrambi i casi sia che si impieghi un controllo analogico che un Master EtherCAT si ottengono i medesi risultati. Per ogni sistema la decisione tra motion control centralizzata o distribuita dipende da come l’impianto si sviluppa, dove attuatori e motori sono dislocati e la distanza tra controller e questi elementi sia da coprire con cavi per raggiungere i vari componenti.