Generalmente quando si parla di Motion Control si pensa a sistemi ad alta velocità con rapidi cambiamenti di direzione. Poter controllare il moto in queste condizioni […]

Generalmente quando si parla di Motion Control si pensa a sistemi ad alta velocità con rapidi cambiamenti di direzione. Poter controllare il moto in queste condizioni comporta sicuramente delle notevoli sfide tecniche; sfide tecniche che si presentano quando si vogliano controllare movimenti a bassissima velocità tipica ad esempio per telescopi o sistemi di puntamento, telecamere a circuito chiuso e in genere nei sistemi di sorveglianza. Questa sessione esamina le problematiche derivanti da un sistema a velocità ultra lenta sia dal punto di vista del sensore di posizione o di velocità, sia da parte del controllore di moto.
Considerando una telecamera mobile PTZ (Pan/Tilt/Zoom) a brandeggio, comunemente chiamata “Gimbal System” per video sorveglianza verso le frontiere, non è raro doversi concentrare su oggetti distanti anche 20 Km dalla telecamera. Quando l’oggetto si muove diventa complesso poterlo seguire perché il campo visivo è molto ristretto e l’obbiettivo può scomparire rapidamente.
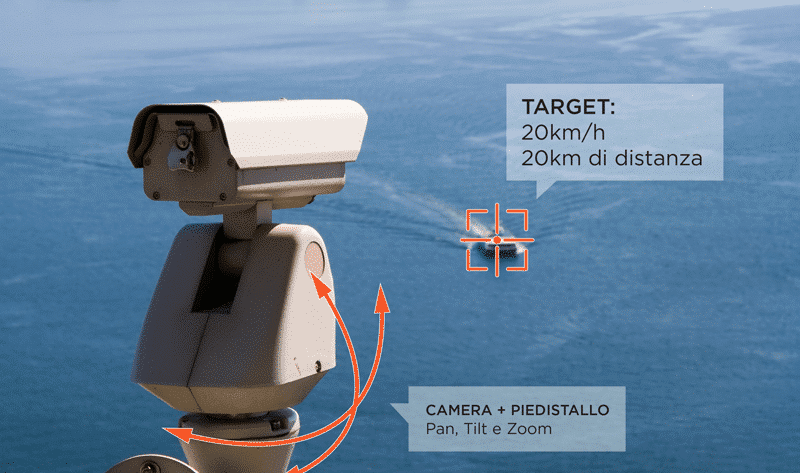
Se l’obbiettivo si muove a 20 Km/ora ad una distanza di 20 Km la telecamera dovrà ruotare a 0,05 RPM, velocità decisamente bassa. Per poter tenere l’obbiettivo all’interno dell’area visibile e centrato rispetto all’area stessa, bisogna controllare accuratamente questa bassissima velocità ed essere rapidi a seguirne i cambiamenti di direzione. Diventa indispensabile impiegare encoder con risoluzione da 18 a 22 bit con risoluzioni pari 4194304 counts/giro, tali da garantire comunque dei movimenti omogenei anche a bassissime velocità.
L’approccio tradizionale è quello di utilizzare un encoder sul motore accoppiato ad un riduttore. Maggiore è il rapporto di riduzione maggiore sarà la risoluzione dell’encoder vista dal controllo, proporzionalmente il sistema complessivo avrà minore dinamica e reattività, oltre ad inserire inevitabilmente giochi meccanici. Tutto questo porta all’impossibilità di seguire oggetti in movimento, se non quelli posti ad una distanza non elevata. L’alternativa e di utilizzare un encoder ad alta risoluzione direttamente sull’albero di uscita del riduttore per la chiusura del loop di posizione, contemporaneamente a quello posto sul motore responsabile del loop di velocità; il tipo di controllo viene definito dual-loop e garantisce che il backlash del riduttore vengano eliminati ottenendo un sistema altamente dinamico. Questo approccio viene impiegato grazie allo sviluppo avvenuto nei sensori di posizione, ora disponibili, ad alta risoluzione accompagnato allo sviluppo di Motion Control altamente performanti.
Encoder tradizionali ad alta risoluzione
Tradizionalmente quando si parla di encoder ad alta risoluzione, ovvero superiori a 18 bit equivalenti a 1000000 di counts/giro, si individuano soluzioni con resolver, encoder ottici o capacitivi. I resolver di alta risoluzione sono notoriamente costosi e possono presentare problemi ingegneristici a causa degli ingombri, del peso e delle tolleranze meccaniche di montaggio, molto stringenti. Gli encoder ottici o capacitivi ad anello sono altrettanto costosi e richiedo meccaniche di precisione per essere impiegati. A differenza dei resolver, che sono molto robusti, gli encoder ottici sono molto sensibili alle vibrazioni e agli urti impiegando dischi di vetro, inoltre la temperatura di esercizio è molto limitata. Sia le versioni ottiche che capacitive soffrono di problemi di affidabilità in presenza di polvere o condensa. I sensori ottici di alta risoluzione, impiegando dischi di vetro incisi, sono particolarmente sensibili a corpi estranei.
Encoder induttivi di nuova generazione
Le tradizionali tecniche per raggiungere alte risoluzioni hanno delle limitazioni, la richiesta di soluzioni innovative è sempre più pressante. Una risposta a queste richieste viene con la nuova generazione di encoder induttivi che offrono risoluzioni sino a 4 milioni di conteggi per giro (22 bit). Gli encoder induttivi, a volte definiti col termine “incOders”, presentano la stessa robustezza meccanica dei resolver, offrono alte risoluzioni senza parti in contatto, possono lavorare in ambienti sporchi essendo immuni a polveri o a corpi estranei e, in fine, possono lavorare in presenza di liquidi o di condensa; sono la soluzione per i progettisti per encoder che debbano lavorare in ambienti difficili, senza doversi occupare di chiuderli in contenitori stagni come invece è necessario se si impiegano encoder ottici o capacitivi. Questi nuovi sensori di posizione possono facilmente essere impiegati con i controlli di nuova generazione Galil. Tempi di campionamento inferiori a 100µsec permettono di controllare in modo ottimale motori che ruotano a bassissime velocità e, grazie alla banda passante di 20 MHz, si possono ottenere contemporaneamente un ottimo sistema anche a velocità elevate. L’integrazione del controllo “dual loop” e particolari filtri antirisonanti agevolano una messa in funzione rapida ed efficace.