Così come era successo dieci anni prima nei sistemi informativi (CED), alla fine degli anni ’80 anche nei sistemi di automazione industriale, e in particolare nel […]
Così come era successo dieci anni prima nei sistemi informativi (CED), alla fine degli anni ’80 anche nei sistemi di automazione industriale, e in particolare nel motion control, iniziava a sentirsi l’esigenza di passare da un’architettura di controllo centralizzata a una distribuita.
Nuovi protocolli di comunicazione deterministici promettevano la trasmissione sincronizzata dei dati tra “Master” e “Slave”. I costruttori di motion control, pionieri di quel tempo, sviluppavano protocolli proprietari su diversi supporti hardware e iniziavano a connettere i servo drive anche con fibre ottiche. Stava nascendo una rivoluzione nel mondo del controllo del moto!
Erano anni di grandi cambiamenti che appassionavano chi li stava vivendo. È stato un onore e una soddisfazione farne parte.
Si profilava rapidamente la necessità di una standardizzazione, al fine di fare chiarezza e facilitare il progetto del sistema di controllo, che non doveva limitarsi ai soli servomotori, ma comprendere anche sensori e sistemi di input e output di varia natura (intero controllo di processo).
I bus di comunicazione che hanno fatto la storia di questa trasformazione nelle architetture di controllo sono noti e meriterebbero una pagina intera.
Passarono dieci anni e, all’inizio del 2000, come vent’anni prima nei sistemi informativi i terminali “stupidi” venivano sostituiti dai PC per permettere memorizzazioni ed elaborazioni locali, così anche nell’automazione arrivavano gli “azionamenti intelligenti”.
I nuovi servoazionamenti “intelligenti”, programmabili e flessibili, dotati di ingressi e uscite digitali e analogiche, collegati in reti deterministiche standardizzate, divennero gli elementi base che portarono a un progressivo disuso dei motion control centralizzati e alla nascita dei controllori del moto PC-based per architettura distribuita.

Queste nuove strategie di controllo costituivano una spinta enorme nella progettazione delle macchine e dei sistemi di processo, permettendo la semplificazione della meccanica attraverso l’impiego di motorizzazioni anche di piccola potenza, sincronizzate elettronicamente con capacità di elaborazione locale. Ciò consentiva di semplificare il traffico sulla rete e di realizzare funzioni locali in tempo reale, quali: pilotaggio di sorgenti laser, lettura e memorizzazione di fronti di salita per cattura di posizione in pochi microsecondi, esecuzione di camme elettroniche e altro ancora…
Una situazione ideale per progettisti e innovatori, che comprendevano il potenziale delle nuove tecnologie e ne traevano vantaggio, sviluppando linee di produzione e macchinari complessi ma efficienti, capaci di integrare centinaia di motori intelligentemente servocontrollati di ogni tipologia: brushless rotativi o lineari, passo-passo o solenoidi retroazionati, in funzione della migliore e più efficiente soluzione di movimento.
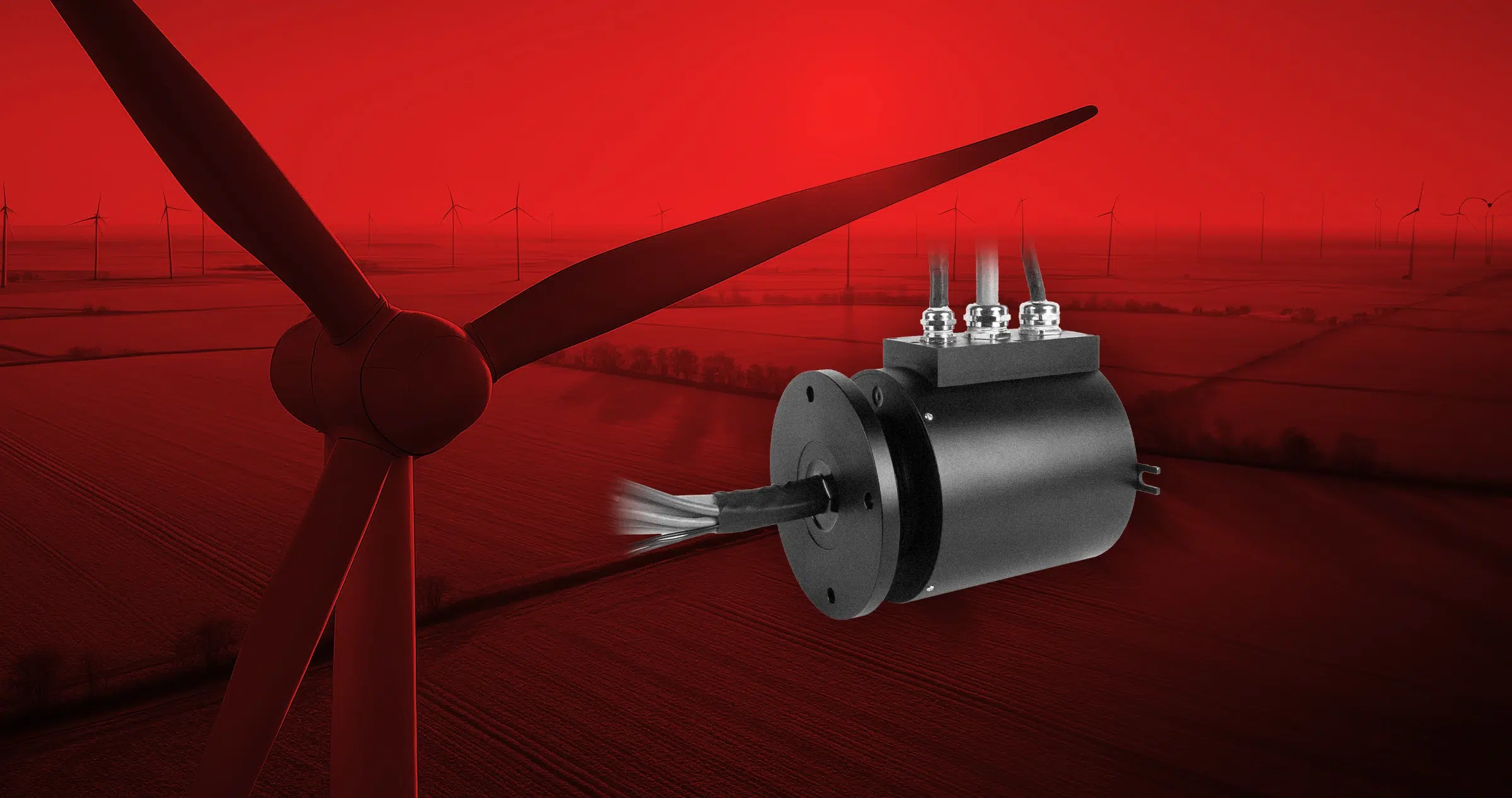
Tutto ciò presentava – e presenta ancora oggi – il problema di dove installare i servo drive, difficilmente collocabili in un armadio.
Distribuire i servo drive sulla struttura della macchina o all’interno del servomotore, riorganizzare il cablaggio e gestire la dissipazione del calore degli elementi di potenza diventa quindi un tema cruciale da affrontare e risolvere.
Ecco una piccola checklist con gli aspetti fondamentali per massimizzare i vantaggi dell’architettura “fisicamente distribuita” a bordo macchina:
- Scegliere la corretta tensione del DC BUS (in funzione delle potenze installate).
- Progettare il cablaggio usando cavi standardizzati e codificati.
- Tenere in considerazione la dissipazione del calore sulla struttura di appoggio.
- Scegliere la corretta tipologia di motorizzazione per performance, dimensione e grado di protezione.
- Progettare, dove possibile, in modo modulare sia logico che fisico.